
Sascha Lange
Neuroinformatics Group
University Osnabrück
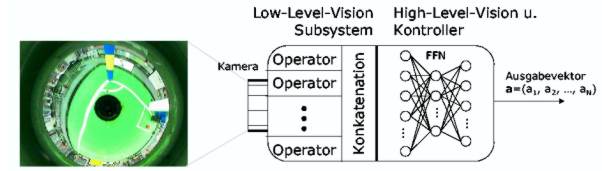
This work addresses the problem of learning on high dimensional visual (image) data, in the absence of any apriori, domain specific information. To achieve this methods of supervised learning an evolutionary algorithms are combined to a hybrid algorithm.
The learned control programs are able to solve several completly different tasks (several robot navigation and image classification tasks have been studied). Those tasks are determined by the provided training data (pairs of images and desired control signals / target output).
In the following section you can find a selection of short videos of several experiments that have been conducted using an omnidirectional RoboCup Robot (Brainstormers Tribot).
There are two seperate videos of each experiment: one documenting the gathering process of the training data and the other showing the performance of the learned control program. Additionally, you will find a brief description of the task. A longer explanation can be found in the master thesis.
| experiment | training | testing | short description |
|---|---|---|---|
| align | balldrehendaten.avi | balldrehentest.avi | The robot has to align its front side (holding the kicking device) to the ball without leaving its position. |
| to the goal | torfahrendaten.avi | torfahrentest.avi | The robot should drive straight to the goal from every starting position. The orientation is irrelevant. |
| to the ball | ballfahrendaten.avi | ballfahrentestgut.avi ballfahrentestschlecht.avi |
The robot should drive straight to the ball from every starting
position. The orientation is relevant: the kicking device should point
to the ball. During this experiment we observed a problem (ballfahrentestschlecht.avi), that is discussed extensively in my master thesis. |
Here you can find some compelete sets of training data, as used in the experiments. Each set is available as zipped archive or browsable image gallery. Every archive contains the training images and two testing sets. The first one is used by the hybrid algorithm to calculate the neural net's generalization error, whereas the second is used to determine the generalization abilities of the resulting best individual). In each archive you will find an additional text file with the assigned target class labels (one for each training image).
| experiment | gallery | archive |
|---|---|---|
| Gaming Pieces | images/spielsteine/images.html | spielsteine.tgz 11.3 MB |
| Dice | images/wuerfel/image.html | wuerfel.tgz 2.8 MB |
| Action Figures | images/figuren/images.html | figuren.tgz 42,3 MB |
All image sets have been personally prepared by the author of this work. You may use these images by courtesy of the author - but without any guarantees and on your own risk - as long as the desired usage will not injure the rights of a third person.
Please note: The images in the set "Action Figures" all show toys that are manufactured by Ferrero or GamesWorkshop. Therefore they may be subject to additional restrictions.
Questions and suggestions are always welcome!
Contact:
sascha.lange@uos.de